Die Software und die Beschreibung stellt Max auf seiner Homepage , kostenlos zur Verfügung.
Da ich an dieser Stelle nicht die Bauanleitung wiederholen möchte beschränke ich mich hier auf meine Erfahrung beim Nachbau und Programmierung.
Die Software und die Beschreibung stellt Max auf seiner Homepage , kostenlos zur Verfügung.
Da ich an dieser Stelle nicht die Bauanleitung wiederholen möchte beschränke ich mich hier auf meine Erfahrung beim Nachbau und Programmierung.
Was ist die Einstellwinkeldifferenz EWD ?
Wichtig ist die Lage von Tragflügel und Höhenleitwerk zueinander, und die ist unabhängig davon, wie wir die Rumpflängsachse definieren. Diese relative Lage nennt man Einstellwinkeldifferenz (violett, kurz EWD). Für längsstabiles Fliegen ist eine Schwerpunktvorlage und eine dazu passende EWD nötig. Die EWD bestimmt dabei die Trimmung, d. h. mit welcher Geschwindigkeit das Modell fliegt. [Quelle: www.rc-network.de ]

Anders als angegeben, habe ich die Bauteile in PLA und nicht in PETG gedruckt, was für die Funktion keinen Unterschied macht. Ich habe die Bauteile in einer Auflösung von 0,3 und 20 % Infill gedruckt. Ansonsten lassen sich die Bauteile, passgenau ohne Probleme Drucken.
Ich hatte Schwierigkeiten das Alu Profil von Bauhaus zu bekommen. Das Profil hat die Maße von 7.5 x 12.5mm was anscheinend kein Standard ist. Beide Baumärkte in München hatten das Profil nicht auf Lager. Bauhaus versendet die Profile über ihren Shop nicht. Blöd….
Über die Internetseite von Bauhaus konnte ich herausfinden wo die Profile auf Lager sind. In Krefeld bin ich fündig geworden. Da ein Freund von mir dort wohnt, besorgte er mir die Profile und brachte mir diese bei seinem nächsten Besuch mit.
Die genaue Bezeichnung bei Bauhaus lautet:
Kantoflex Rechteckrohr 1.000 x 12,5 x 7,5 mm, Stärke: 1 mm, Aluminium, Blank
[Mehr Info]
Das Alu Profil hat bei mir leider nicht ganz in die Halter gepasst, mein Drucker hat die Rechteckaussparung zu kein gedruckt, ich musste ganz schön feilen bis das Profil passte.
Der Elektronische Aufbau ist problemlos und sollte von jedem der einen Lötkolben richtig herum halten kann zu meistern sein. Das Schaltbild von Max ist übersichtlich gezeichnet.
Was muss ich beachten oder habe ich sonst gemacht?
– Die 9V Plus liegen nur am VIN an !
– Die Sensoren und das Display werden mit +5V vom Arduino versorgt
– Der Arduino benötigt auch von der Batterie eine Masse (GND), was logisch ist, aber auf der Zeichnung nicht ganz eindeutig zu erkennen ist.
– Der 10 kOhm Widerstand ist nicht nötig da ein anderer Sensor verwendet wird als auf der Zeichnung angegeben ist. (ist auf der Homepage von Max beschrieben). Es wird eine Drahtbrücke von PIN SA0 auf den 3,3V Pin gelötet. Die Brücke wird nur auf einem Sensor eingelötet (damit wird der Sensor adressiert). Sonst haben beide Sensoren die gleiche Adresse im Bussystem.
– Die Sensoren habe ich mit doppeltem Klebeband in die Halter geklebt, hatte keine passenden Schrauben zur Hand.
– Als EIN/AUS Schalter habe ich einen kleinen Schiebeschalter verwendet
– Das Loch für den USB Stecker habe ich im Gehäuse vergrößert damit dieser besser passt. Hatte Wackelkontakte an der COM Schnittstelle
– Den I⊃2;C Adapter habe ich auf das LCD 1602 Display gelötet, hier sollte der Adapter so nah wie möglich am Display sitzen. Sonst bekomme ich Probleme mit der Bauhöhe. Der I⊃2;C Adapter sitzt später über dem Arduino Board.
– Die 4 Kontakte vom Adapter müssen um 90 Grad gebogen werden, sonst passt das Display nicht in das Gehäuse.
Ich hatte zum erstem mal eine Arduino Nano Board in der Hand, habe aber schon einige andere Amtel Prozessoren geflasht. Sollte also machbar sein.
Erste Hürde…
Das File „EWDuino2.ino“ ist beim kompilieren immer mit Fehlermeldung abgebrochen.
Lösung, die Include Dateien müssen in das Verzeichnis c:\Users\XXXXX\Documents\Arduino\ kopiert werden.
Die XXXXX stehen für Dein Benutzername.
Zweite Hürde…
Mein Display hat nichts angezeigt, habe alles Mögliche probiert bis ich draufgekommen bin, das es auf dem I2;C Adapter ein blaues Poti gibt, hier war der Kontrast auf Null gedreht. Dreht das Poti also gleich mal in die Mittelstellung.
Die I⊃2;C Adressen haben bei mir gestimmt. Dies kann man mit dem I⊃2;C Scanner kontrollieren. Die Ausgabe erfolgt über den Serial-Monitor.
Dann hat es auch schon funktioniert, freu….
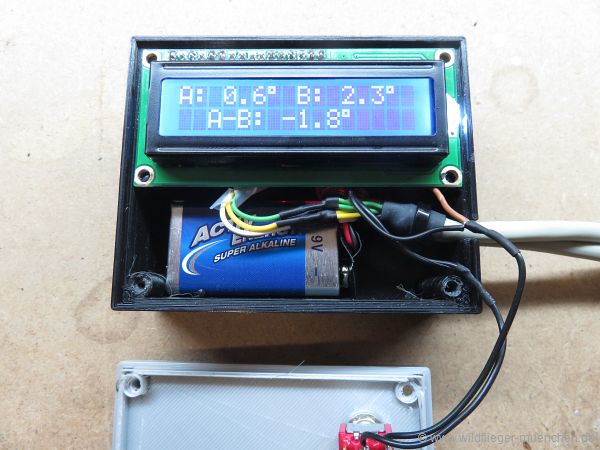
Ich habe mir dann noch für die Anzeige im Display die Sensorbezeichung A und B umbenannt in „F“ für Flügel und „H“ für Höhenruder, statt AB habe ich „EWD“ einprogrammiert.

Nach hochladen des Kalibrationssketch wurden die Werte ausgelesen und in einem File gesichert. Diese trägt man im Sketch der EWD Waage ein und flasht das File wieder in den Arduino.
Damit hatte ich meine Schwierigkeiten in welchem Format man diese in den Sketch einträgt. Da habe ich mal bei Max, dem Erfinder des Ganzen angefragt, und folgende Antwort bekommen:
Also die Sensoren für Flächen und Höhe haben jeweils 3 Achsen -> X,Y und Z. Für die Kalibrierung braucht jede Achse einen Offset und einen Gain.
offset_AX im Hauptsketch ist z.B. der Offset der X-Achse von Sensor A.
Im Output des Kalibrationssketch sind die Werte nicht bezeichnet, folgen aber dem Schema X,Y, Z
Die Min/Max dienen nur der Orientierung beim Kalibrieren und müssen nicht übertragen werden.
Minima Sensor A: -3998 -4056 -3992
Maxima Sensor A: 4032 4124 4112
Und hier ist nun der erste Wert der Offset der X-Achse v. Sensor A, der Zweite die Y-Achse und der dritte die Z Achse.
Hier im Beispiel beschriftet:
„Offset Sensor A: X85 Y132 Z159 “
Dasselbe bei Gain.
Gain Sensor A: X 0.9989011000000 Y 0.9152625400000 Z 0.9020757300000
Du müsstest du jetzt im Hauptsketch bei „define offset_AX“ die 85 Eintragen bei „offset_AY“ die 132 und so weiter..
Vielen Dank an Max für diese Infos.
Den Bau der Digitale EWD Waage von Max kann ich nur empfehlen, diese funktioniert bei mir sehr gut